Nadeau Innovations has been acquired by
SmartOne.ai.
Click here to learn more.
Click here to learn more.
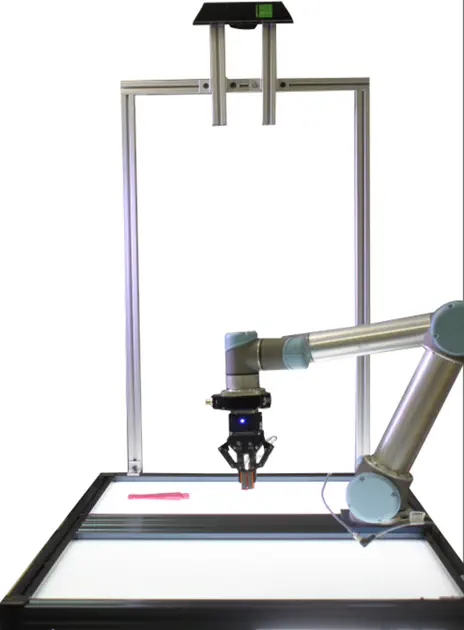
The 2018 IROS Fan Robotic Challenge tasked participants with programming a robot to autonomously open and close a Spanish folding fan, highlighting the obstacles still associated with the dexterous manipulation of objects for robotic systems. Since high DoFs grippers are complex to coordinate and overkill for many industrial processes, our approach used an under-actuated parallel gripper with a 3D-printed adaptation to precisely grasp the fan in such a manner that gravity could be leveraged to act on the fan to produce an extrinsic, or external, dexterity. With our approach, we completed the challenge in 12.38 seconds, resulting in a top three finish. Furthermore, using a multi-modal tactile sensor, we analyzed the vibrations in the grasp during the manipulation and were able to distinguish the opening and closing of the fan from the motion of the robot with a 83% accuracy.