This talk presents the story and software architecture behind an experimentally tested, machine learning framework for robot contact classification and motion control using a KUKA LBR iiwa robot, gRPC, and Python.
Project Director @ Halodi Robotics, running our worldwide projects and building the North American HQ in Montréal
Moonlight as a mentor for Techstars and FounderFuel
Ph.D. at ÉTS focusing on collaborative robotics + machine learning, and mechanical + biomedical engineering at McGill
Typically find me at the interface of hardware and software.
I’m fortunate to have the opportunity to work at Halodi Robotics and work on collaborative robotics
We want to bring robots into the human world instead of changing the world for robots
This is very different from the typical approach in industrial robotics, where entire factories are built around just the robots, not the humans
We have the dream of creating helper robots for home and healthcare, but that’s a challenging application
So we’re taking things step-by-step and are starting with “simpler” applications in the human world, such as security guarding, retail, and food packaging
But while robotics is full of complex problems, let’s focus on my favourite: physical human-robot interaction
How do we make physical human-robot interaction safe?
How do we make it safe?
How do we ensure that when robots collide, contact, and crash into humans, that it’s safe?
Well, that’s what I tried to solve during my Ph.D., and this guiding question led me to create some weird systems.
The original idea of my research was to perform freehand medical ultrasound on human limbs using collaborative robots
But I soon realized that just the physical interaction between a probe and the human body was a fascinating problem that needed more attention
Pure motion control is not good enough, and tuning the controller and all the parameters for physical human-robot interaction is not trivial
And every body part or object with different stiffnesses and properties would need its controller tuning
Then I also thought, “wait, this is an unstructured environment; how does the robot know what it’s in contact with?”
Can I also train a model to tell the difference between a leg and a table just by touch? How about the difference between a calf, knee, and ankle?
So for a typical machine learning and optimization approach, I would collect a lot of training data, apply it to a model, get some output, update the model, and repeat
But where do I put the robot and the actual hardware in this process?
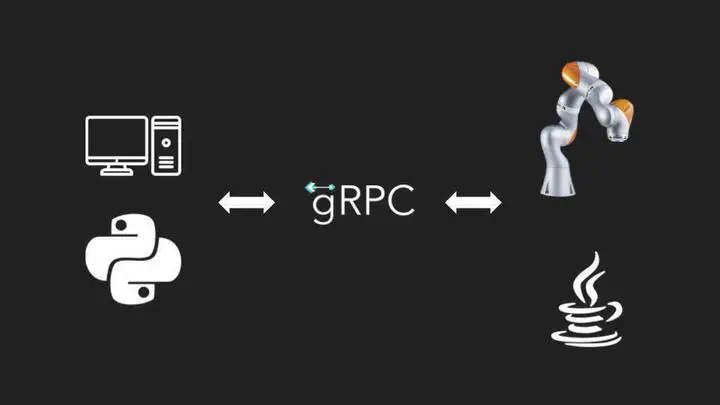
And how should I implement communication between my Python data science stack and the Java-based controller that the robot uses?
Well, to solve the communications issue, gRPC was the answer
It allowed me to create a client-server model between the robot and my python stack
The robot was a “server” in the eyes of the data models and training algorithms
The function callbacks from the optimization loops would call blocking server functions on the robot, which would make the robot move or do something physical
The return value was the data collected from the robot’s onboard sensors
For those not familiar with gRPC, we define our service using a language-neutral proto file that can auto-generate boilerplate code in basically every language.
Python and Java in this case
It’s a lot of fun because it integrates nicely into CI/CD. All my services and codebases can use the same core proto definition, and their interfaces can stay in sync.
First, we define a service that contains a set of functions we’d like to call from our client.
In this example, we have a “RobotService” that has a “Move” command.
It requires an array of joints as an input and returns a SessionResult message object.
Those message objects are then defined below.
On the python side, we define a class for our client with the service stub boilerplate
for the actual training and optimization, we can call the robot as if it were a simple function provider
we connect to the robot through our controller client class and call services whenever we need
here’s an example of using Scipy’s differential optimization with a simple callback objective function that has the robot run a motion session
The result of that session may contain a bunch of data from the robot that we then evaluate to obtain a single float value that we’re trying to minimize
And here’s where this particular example was used in real life.
The human body is a deformable surface and an unstructured environment, a safety concern and a challenge for trajectory planning and control.
I was trying to optimize for the smoothest, bounce-free motion along a limb while performing ultrasound.
to tune the parameters, differential evolution was used with the robot in the loop
each time the “evaluate fitness” step is run, that’s the actual robot with the Java controller being called from the scipy optimization function through gRPC to run a session with a given vector of motion settings
it responds to the python data processing client with a SessionResult filled with force sensor data that then is converted to a single float measure of fitness or quality
Through real-world sessions with a collaborative robot, the framework tuned motion control for optimal and safe trajectories along the human leg phantom.
Hundreds of sessions were performed, and generations of candidate solutions were developed
And here we have the result of this particular experiment: smooth motion
So from an experimental design perspective, the big win with something like this is that I can set it and forget it, letting it collect all the data and run its own sessions on its own
This leads me to one of the simplest and silliest experiments I ever designed…
Guess what I did here…
Yup, I had the robot learn to poke
Robotic medical ultrasound is an example of a task where simply stopping the robot upon contact detection may not be an appropriate reaction strategy.
The robot should have an awareness of body contact location to plan force-controlled trajectories along the human body properly
So Here I made a framework for robot contact classification using robot force sensor data
We wanted to build a classifier model that answered the question: “What was involved in the contact event?”
To gather the data to train the classifier, the robot was programmed to poke until a force condition was triggered with several different scenario types
Built on the same communications architecture where the python data science and machine learning stack treated the robot as a server with callable functions through gRPC
Once again, the big win with something like this is that I can set it and forget it, letting it collect the training data for me
I can also quickly test my code by mocking the robot “server” from the client’s perspective
This allows for a beautiful separation of concerns and a more robust codebase
Back to the application… On the machine learning side, We turned to scikit-learn for a simple, quick, and effective pipeline
With just half a second of single-axis force data, some preprocessing steps, and a decision tree classifier, we were able to have the robot know WHAT was involved in the contact event, not just that a collision occurred
The code is quite simple too
Scikit-learn makes it trivial to create and train pipelines, even branching pipelines with multiple preprocessing steps
This lets us test our hypotheses quickly and effectively
Beyond machine learning applications, I’ve used this python data stack connecting through gRPC to hardware for a variety of applications, including robot calibration with laser systems
The FARO laser was also controlled with gRPC
And this is why I love this architecture for bringing hardware into the loop: it’s scalable and testable
All these hardware devices become abstract servers that provide a set of callable functions to a client
The client doesn’t need to know what they are or how they’re implemented, which makes it great for testing and mocking
The hardware controllers don’t need to know anything about machine learning, data science, or application stuff; they focus on what they need to do to execute the function properly
All my interfaces can stay versioned and in sync with autogenerated boilerplate and proto files
And from a hardware engineering perspective, my experiment design and setup time is significantly reduced through automation and a well-defined interface
Nicholas Nadeau is a fractional CTO empowering startups with next-gen technology expertise, and a passion for driving corporate innovation.
Stay informed on cutting-edge hard tech trends - subscribe to my newsletter. Ready to innovate? Discover my services and accelerate your growth.